V dnešním článku srovnám elektronické gyroskopy InvenSense ITG-3200 a ST L3G4200D a to především podle šumu, teplotní závislosti offsetů a závislosti offsetů na tíhovém zrychlení.
Oba senzory měli při měření nastaveny obdobné parametry.
- Oba: rozlišení 2000 °/s, vzorkovací frekvence 200 Hz
- ITG-3200: dolnopropustní filtr 98 Hz
- L3G4200: dolnopropustní filtr 70 Hz
Popis senzorů
ITG-3200
Tento senzor jsem popsal již v tomto dřívějším článku.
L3G4200D
Elektronický gyroskop L3G4200D je 16 bitový tříosý mikromechanický senzor úhlové rychlosti. Senzor má mimo jiné programové nastavitelné rozlišení (±250 °/s, ±500 °/s, ±2000 °/s), vzorkovací frekvenci a k dané vzorkovací frekvenci i dolnopropustní filtr. Dále má senzor v sobě integrován teploměr se vzorkovací frekvencí 1 Hz, 8 bitovým rozlišením s citlivostí 1 °C/LSB. Komunikace se senzorem je možná po sběrnici I2C nebo SPI. Výrobce se u tohoto senzoru chlubí výjimečnou stálostí offsetů.
Šum
Obrázek 1 zobrazuje graf s naměřeným hodnotami úhlových rychlostí pro stejnou osu z obou senzorů. Senzor L3G4200D měl nulový offset a naměřená data jsou tedy zobrazena bez jakýchkoliv úprav. U senzoru ITG-3200 byl pro lepší srovnání odečten nenulový offset, který nemá na šum vliv. Z grafu je zřejmé, že šum má v obou případech nulovou střední hodnotu. V tomto srovnán jasně vítězí senzor ITG-3200, neboť má násobně menší šum (v řádu několika málo LSB).
 |
| Obrázek 1: Srovnání šumu |
Závislost offsetů na orientaci vektoru tíhového zrychlení
Tuto závislost jsem pro senzor ITG-3200 naměřil již dříve a publikoval v tomto článku. Zde již pouze uvedu, že závislost nebyla prokázána.
Naměřená data ze senzoru L3G4200D jsou zobrazena na Obrázku 2. Při měření byl senzor natočen do šesti poloh tak, aby vždy vektor tíhové zrychlení byl rovnoběžný z jednou z os senzoru. Offset je zřejmě nezávislý na orientaci senzoru vůči Zemi a tedy orientaci vektoru tíhového zrychlení.
 |
| Obrázek 2: Závislost offsetu senzoru L3G4200D na orientaci vůči Zemi |
Závislost offsetů na teplotě
Senzory byly podchlazovány pomocí Peltierova článku M-TEC1-01708 a ohřívány pomocí horkovzdušné pistole. Teplota je měřena vždy čidlem teploty integrovaným přímo v pouzdře senzoru.
L3G4200D
Závislost na teplotě je u senzoru L3G4200D zřejmá z grafu na Obrázku 3. Na Obrázku 4 je zobrazen graf závislosti offsetu senzoru pro osu Z. Při změně teploty o cca 45 °C se offset změnil o cca 0,75 °/s. Nutno podotknout, že v obou grafech je teplota vynesena diferenčně tak, jak ji měří integrovaný teploměr.
 |
| Obrázek 3 |

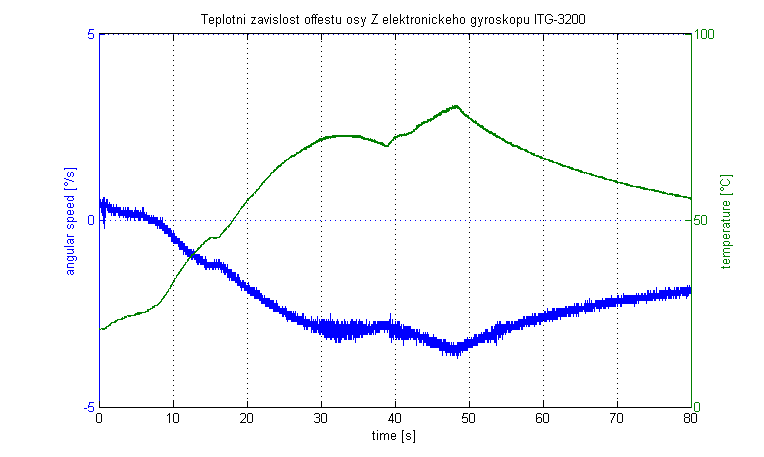
ITG-3200
Podrobnější rozbor závislosti offsetu senzoru ITG-3200 jsem uvedl v tomto článku. Zde pouze publikuji grafy s naměřenými daty pro větší teplotní rozsah.

Závěr
Dle výše uvedených grafů považuji za vítěze tohoto srovnání elektronický gyroskop ITG-3200 od firmy InvenSnese. Má sice podstatně větší offset ve všech osách i mírně větší teplotní závislost offsetů, nicméně samotná velikost offsetu není zajímavá pokud je stabilní. Stabilní v tomto případě sice není, neboť je závislý na teplotě, ale díky velmi dobrému integrovanému teploměru, který má větší rozlišení i vzorkovací frekvenci než L3G4200D, je možné tuto závislost kompenzovat. Oproti svému konkurentovi navíc vyniká menším šumem.
Žádné komentáře:
Okomentovat